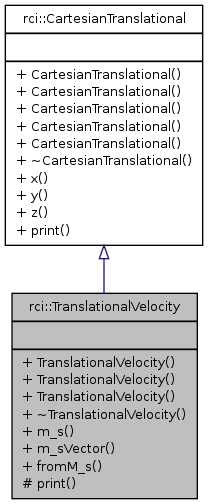
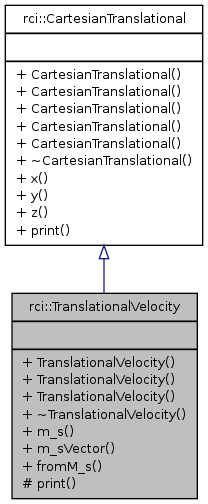
rci::TranslationalVelocity Class Reference
Domain object, representing a cartesian translatory velocity. More...
#include <CartesianVelocity.h>
Public Member Functions | |
| TranslationalVelocity () | |
| TranslationalVelocity (double valx, double valy, double valz) | |
| TranslationalVelocity (nemo::RealVector values) | |
| ~TranslationalVelocity () | |
| virtual double | m_s (unsigned int index) |
| virtual nemo::RealVector | m_sVector () |
Static Public Member Functions | |
| static TranslationalVelocityPtr | fromM_s (double x, double y, double z) |
| Shared Pointer Factory. | |
Protected Member Functions | |
| virtual std::string | print () const |
| Printing the pose object. | |
Detailed Description
Domain object, representing a cartesian translatory velocity.
Default representation is in  , according to the International Unit System (SI).
, according to the International Unit System (SI).
Definition at line 52 of file CartesianVelocity.h.
Constructor & Destructor Documentation
| rci::TranslationalVelocity::TranslationalVelocity | ( | ) |
Definition at line 39 of file CartesianVelocity.cpp.
Referenced by fromM_s().
| rci::TranslationalVelocity::TranslationalVelocity | ( | double | valx, | |
| double | valy, | |||
| double | valz | |||
| ) |
Definition at line 46 of file CartesianVelocity.cpp.
| rci::TranslationalVelocity::TranslationalVelocity | ( | nemo::RealVector | values | ) |
| rci::TranslationalVelocity::~TranslationalVelocity | ( | ) |
Definition at line 43 of file CartesianVelocity.cpp.
Member Function Documentation
| TranslationalVelocityPtr rci::TranslationalVelocity::fromM_s | ( | double | x, | |
| double | y, | |||
| double | z | |||
| ) | [static] |
Shared Pointer Factory.
Definition at line 55 of file CartesianVelocity.cpp.
References TranslationalVelocity().
| double rci::TranslationalVelocity::m_s | ( | unsigned int | index | ) | [virtual] |
Definition at line 60 of file CartesianVelocity.cpp.
| nemo::RealVector rci::TranslationalVelocity::m_sVector | ( | ) | [virtual] |
Definition at line 64 of file CartesianVelocity.cpp.
| std::string rci::TranslationalVelocity::print | ( | ) | const [protected, virtual] |
Printing the pose object.
- Returns:
- Textual representation of this pose.
Reimplemented from rci::CartesianTranslational.
Definition at line 68 of file CartesianVelocity.cpp.
The documentation for this class was generated from the following files:
- rci/dto/CartesianVelocity.h
- rci/dto/CartesianVelocity.cpp
Generated on Thu Aug 2 14:03:03 2012 for RCI by
 1.6.3
1.6.3