NaoAV¶
Introduction¶
The NaoA/V setup is a hack that allows to- transmit camera images and audio buffers from the Nao robot to a different node
- synchronize audio and video data streams
- store the synchronized audio/video stream in a container file
It consists of several components:
- On the Nao robot
rsbvideosenderrsbaudiosender
- In a receiver/synchronization/store process on a workstation
gst_nao_audio_importgst_nao_video_import
Static View¶

Implementation¶
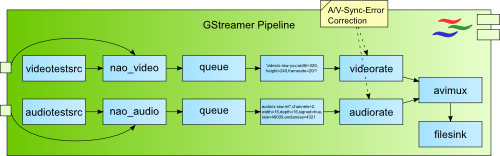
The implementation uses the GStreamer multimedia framework to synchronize, mux and store the audio and video streams. GStreamer is capable of aligning and synchronizing the audio and video streams which are received via RSB and producing a merged A/V stream that is suitable for writing to a video container file. In order to perform this synchronization, GStreamer makes use of the timestamps which are included in all RSB events.
The abovementioned processing pipeline can be instantiated from the commandline as follows:
gst-launch-0.10 \ audiotestsrc do-timestamp=FALSE \ ! rsb_nao_audio_import pubName="/nao/audio/all" \ ! queue \ ! "audio/x-raw-int", channels=2, width=16, depth=16, signed=TRUE, rate=48000, endianess=4321 \ ! audiorate \ ! mux. videotestsrc do-timestamp=FALSE \ ! rsb_nao_video_import pubName="/nao/vision/top" \ ! queue \ ! videorate \ ! 'video/x-raw-yuv,width=320,height=240,framerate=20/1' \ ! mux. avimux name="mux" \ ! filesink location="/tmp/bla.avi"
The pipeline uses the following audio and video parameters
Audio:| Parameter | Value |
|---|---|
| Channels | 2 (out of 4 Nao microphones) |
| Bits per sample | 16 |
| Sample rate | 48 kHz |
| Parameter | Value |
|---|---|
| Width | 320 px |
| Height | 240 px |
| Frame rate | 20 Hz |
| Colorspace | YUV |
| Pixel Format | YV12 |
{kind=link}
{kind=link}