NaoAV » History » Version 2
« Previous -
Version 2/9
(diff) -
Next » -
Current version
J. Moringen, 07/05/2011 07:05 PM
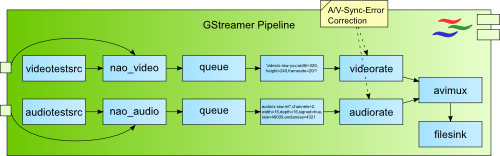
added static-view figure
NaoAV¶
Introduction¶
The NaoA/V setup is a hack that allows to- transmit camera images and audio buffers from the Nao robot to a different node
- synchronize audio and video data streams
- store the synchronized audio/video stream in a container file
It consists of several components:
naovideosendernaoaudiosendergst_nao_audio_importgst_nao_video_import
Static View¶

{kind=link}
{kind=link}
{kind=link}