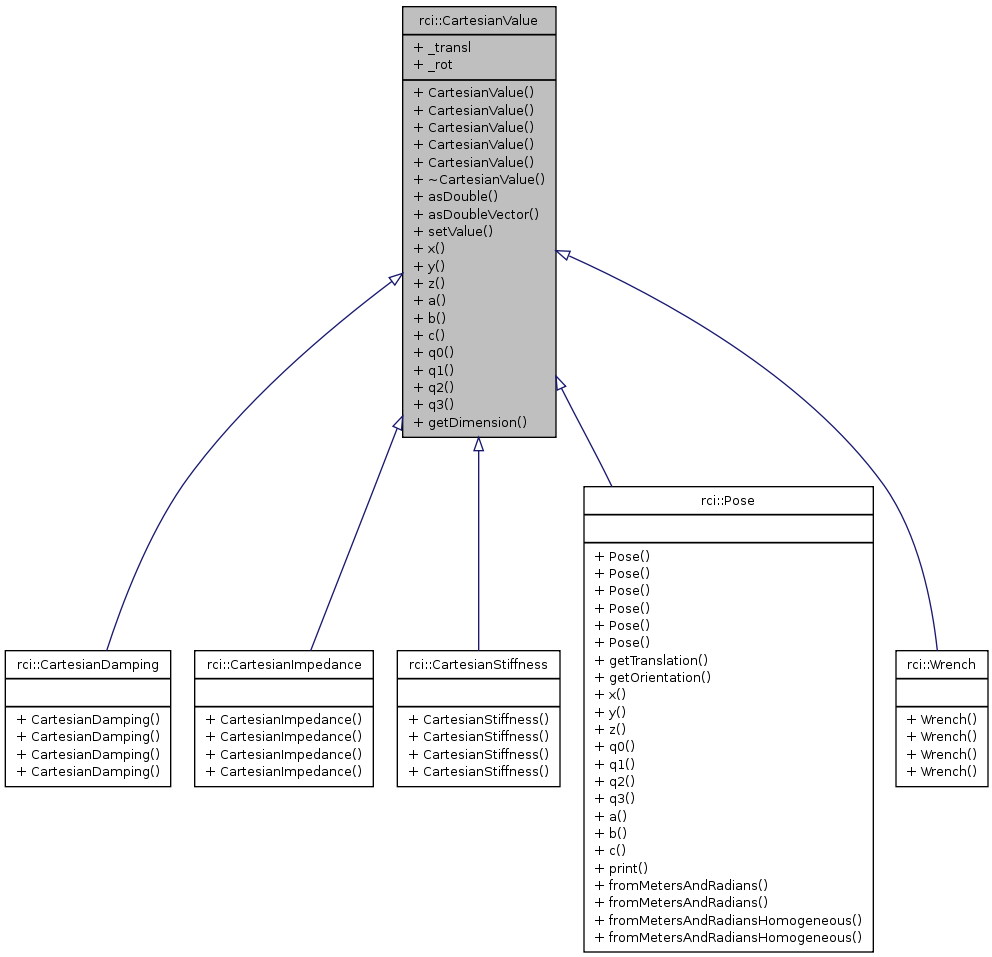
rci::CartesianValue Class Reference
Domain object, representing a full cartesian pose, consisting of translational transformation and orientation. More...
#include <CartesianValues.h>
Public Member Functions | |
| CartesianValue () | |
| CartesianValue (double valx, double valy, double valz, double vala, double valb, double valc, double vald) | |
| CartesianValue (const nemo::RealVector &values) | |
| CartesianValue (const CartesianValue &val) | |
| CartesianValue (const CartesianTranslationalPtr &transl, const CartesianRotationalPtr &rot) | |
| virtual | ~CartesianValue () |
| virtual double | asDouble (unsigned int index) const |
Returns translation and rotation components (quaternion components):  . . | |
| virtual nemo::RealVector | asDoubleVector () const |
| Returns translation and rotation components (quaternion components) as 7-dimensional vector . | |
| virtual void | setValue (unsigned int index, double value) |
| Sets double values (in-place), index 0-2 set Translation in default representation, index 3-6 sets Orientation in default representation. | |
| virtual double | x () const |
| Domain specific getter for 1st translatory value. | |
| virtual double | y () const |
| Domain specific getter for 2nd translatory value. | |
| virtual double | z () const |
| Domain specific getter for 3rd translatory value. | |
| virtual double | a () const |
| Domain specific getter for 1st rotatory value. | |
| virtual double | b () const |
| Domain specific getter for 2nd rotatory value. | |
| virtual double | c () const |
| Domain specific getter for 3rd rotatory value. | |
| virtual double | q0 () const |
| Domain specific getter for 1st rotatory value. | |
| virtual double | q1 () const |
| Domain specific getter for 2nd rotatory value. | |
| virtual double | q2 () const |
| Domain specific getter for 3rd rotatory value. | |
| virtual double | q3 () const |
| Domain specific getter for 3rd rotatory value. | |
| virtual unsigned int | getDimension () const |
| Get dimension / number of values. | |
Public Attributes | |
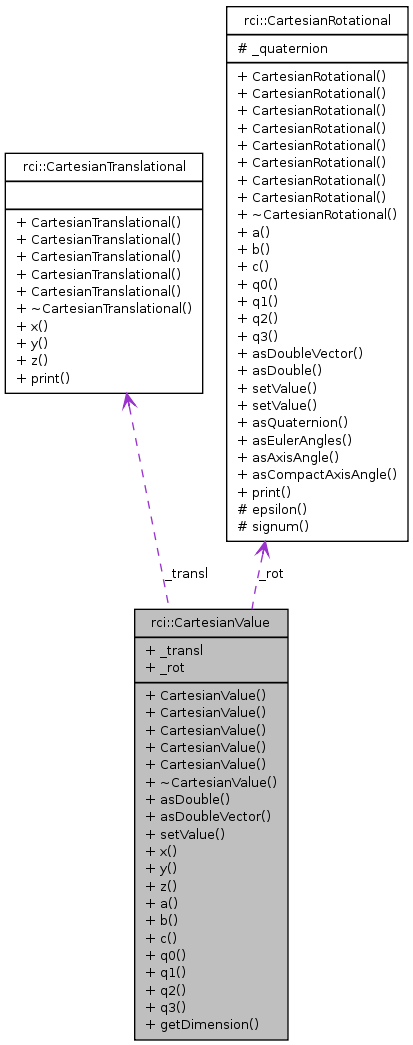
| CartesianTranslational | _transl |
| CartesianRotational | _rot |
Detailed Description
Domain object, representing a full cartesian pose, consisting of translational transformation and orientation.
Definition at line 243 of file CartesianValues.h.
Constructor & Destructor Documentation
| rci::CartesianValue::CartesianValue | ( | ) |
Definition at line 339 of file CartesianValues.cpp.
| rci::CartesianValue::CartesianValue | ( | double | valx, | |
| double | valy, | |||
| double | valz, | |||
| double | vala, | |||
| double | valb, | |||
| double | valc, | |||
| double | vald | |||
| ) |
Definition at line 346 of file CartesianValues.cpp.
| rci::CartesianValue::CartesianValue | ( | const nemo::RealVector & | values | ) |
| rci::CartesianValue::CartesianValue | ( | const CartesianValue & | val | ) |
Definition at line 352 of file CartesianValues.cpp.
| rci::CartesianValue::CartesianValue | ( | const CartesianTranslationalPtr & | transl, | |
| const CartesianRotationalPtr & | rot | |||
| ) |
Definition at line 356 of file CartesianValues.cpp.
| rci::CartesianValue::~CartesianValue | ( | ) | [virtual] |
Definition at line 343 of file CartesianValues.cpp.
Member Function Documentation
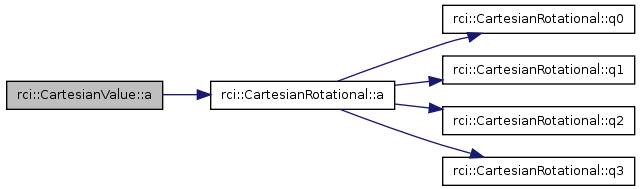
| double rci::CartesianValue::a | ( | ) | const [virtual] |
Domain specific getter for 1st rotatory value.
- Returns:
- 1st rotatory value
Reimplemented in rci::Pose.
Definition at line 435 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::a().
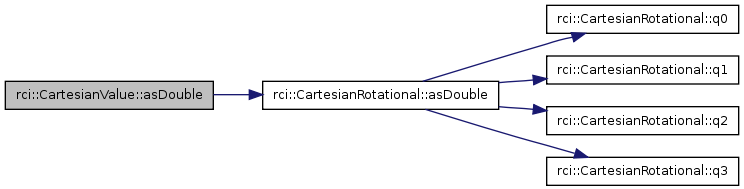
| double rci::CartesianValue::asDouble | ( | unsigned int | index | ) | const [virtual] |
Returns translation and rotation components (quaternion components): .
- Parameters:
-
index Index to receive
- Returns:
- Translation or rotation component
Definition at line 371 of file CartesianValues.cpp.
References _rot, _transl, and rci::CartesianRotational::asDouble().
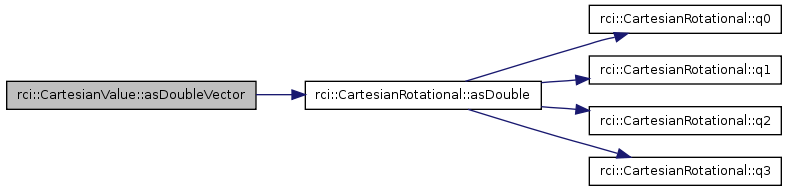
| RealVector rci::CartesianValue::asDoubleVector | ( | ) | const [virtual] |
Returns translation and rotation components (quaternion components) as 7-dimensional vector .
- Returns:
- 7-dimensional vector
Definition at line 382 of file CartesianValues.cpp.
References _rot, _transl, and rci::CartesianRotational::asDouble().
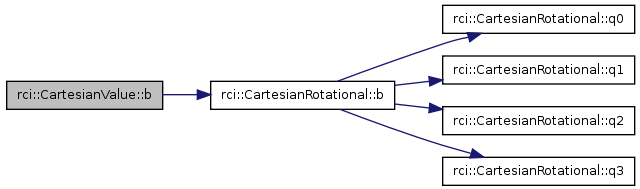
| double rci::CartesianValue::b | ( | ) | const [virtual] |
Domain specific getter for 2nd rotatory value.
- Returns:
- 2nd rotatory value
Reimplemented in rci::Pose.
Definition at line 439 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::b().
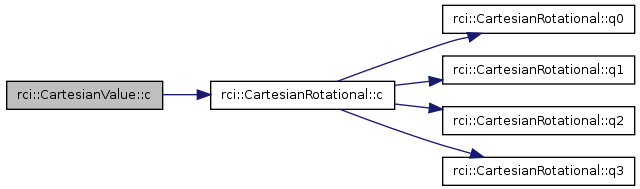
| double rci::CartesianValue::c | ( | ) | const [virtual] |
Domain specific getter for 3rd rotatory value.
- Returns:
- 3rd rotatory value
Reimplemented in rci::Pose.
Definition at line 443 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::c().
| unsigned int rci::CartesianValue::getDimension | ( | ) | const [virtual] |
Get dimension / number of values.
- Returns:
- Number of contained values (6)
Definition at line 447 of file CartesianValues.cpp.
| double rci::CartesianValue::q0 | ( | ) | const [virtual] |
Domain specific getter for 1st rotatory value.
- Returns:
- 1st rotatory value
Reimplemented in rci::Pose.
Definition at line 419 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::q0().

| double rci::CartesianValue::q1 | ( | ) | const [virtual] |
Domain specific getter for 2nd rotatory value.
- Returns:
- 2nd rotatory value
Reimplemented in rci::Pose.
Definition at line 423 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::q1().

| double rci::CartesianValue::q2 | ( | ) | const [virtual] |
Domain specific getter for 3rd rotatory value.
- Returns:
- 3rd rotatory value
Reimplemented in rci::Pose.
Definition at line 427 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::q2().

| double rci::CartesianValue::q3 | ( | ) | const [virtual] |
Domain specific getter for 3rd rotatory value.
- Returns:
- 3rd rotatory value
Reimplemented in rci::Pose.
Definition at line 431 of file CartesianValues.cpp.
References _rot, and rci::CartesianRotational::q3().

| void rci::CartesianValue::setValue | ( | unsigned int | index, | |
| double | value | |||
| ) | [virtual] |
Sets double values (in-place), index 0-2 set Translation in default representation, index 3-6 sets Orientation in default representation.
- Parameters:
-
index Index to set value at value Desired value
Definition at line 396 of file CartesianValues.cpp.
References _rot, _transl, and rci::CartesianRotational::setValue().

| double rci::CartesianValue::x | ( | ) | const [virtual] |
Domain specific getter for 1st translatory value.
- Returns:
- 1st translatory value
Reimplemented in rci::Pose.
Definition at line 407 of file CartesianValues.cpp.
References _transl, and rci::CartesianTranslational::x().

| double rci::CartesianValue::y | ( | ) | const [virtual] |
Domain specific getter for 2nd translatory value.
- Returns:
- 2nd translatory value
Reimplemented in rci::Pose.
Definition at line 411 of file CartesianValues.cpp.
References _transl, and rci::CartesianTranslational::y().

| double rci::CartesianValue::z | ( | ) | const [virtual] |
Domain specific getter for 3rd translatory value.
- Returns:
- 3rd translatory value
Reimplemented in rci::Pose.
Definition at line 415 of file CartesianValues.cpp.
References _transl, and rci::CartesianTranslational::z().

Member Data Documentation
Definition at line 247 of file CartesianValues.h.
Referenced by a(), rci::Pose::a(), asDouble(), asDoubleVector(), b(), rci::Pose::b(), c(), rci::Pose::c(), rci::CartesianImpedance::CartesianImpedance(), rci::Pose::print(), q0(), rci::Pose::q0(), q1(), rci::Pose::q1(), q2(), rci::Pose::q2(), q3(), rci::Pose::q3(), and setValue().
Definition at line 246 of file CartesianValues.h.
Referenced by asDouble(), asDoubleVector(), rci::CartesianImpedance::CartesianImpedance(), rci::Pose::print(), setValue(), x(), rci::Pose::x(), y(), rci::Pose::y(), z(), and rci::Pose::z().
The documentation for this class was generated from the following files:
- rci/dto/CartesianValues.h
- rci/dto/CartesianValues.cpp
Generated on Thu Aug 2 14:03:03 2012 for RCI by
 1.6.3
1.6.3